
teilen
Experten-Blog
Route planning / -optimisation
Transport management
Monday, 23. September 2019
Bleiben Sie immer auf dem Laufenden mit unserem Blog-Abo!

Author
Dr. Stefan Anschütz
The graduate business mathematician (Germany & USA) did his doctorate on evolutionary optimisation algorithms. During this time, he worked as a lecturer for software development and computer-aided planning, among other things, and conducted research as a visiting scientist at Stanford University. The family father, passionate cross-country skier & beach volleyball player heads the fortunes of Opheo Solutions GmbH. Previously, he was co-founder and board member of initions AG, from which Opheo Solutions GmbH was spun off in 2021.
The 3 levels of scheduling automation
Everyone is talking about autonomous driving. But how will the use of trucks actually be planned and controlled in the future? What automation steps can be expected in dispatching and how will they change the dispatcher’s job? A closer look shows: Although the automation of dispatching is independent of the development towards autonomous driving, it is proceeding in quite comparable stages.
Automation in vehicles has been advancing inexorably for years. Even if the vision of autonomous driving is not yet an everyday reality today, the road ahead is reasonably clear. The steps to completely ‘driverless driving’ have been described by the German Automobile Manufacturers Association (VDA) in its concept as the “5 stages of automated driving”.
In addition to autonomous driving, however, the automation of truck dispatching will also have a drastic impact on transport management in road freight transport. At the end of this development, there will be a significant increase in efficiency in the use of vehicle resources and a permanently changed dispatcher’s workplace.
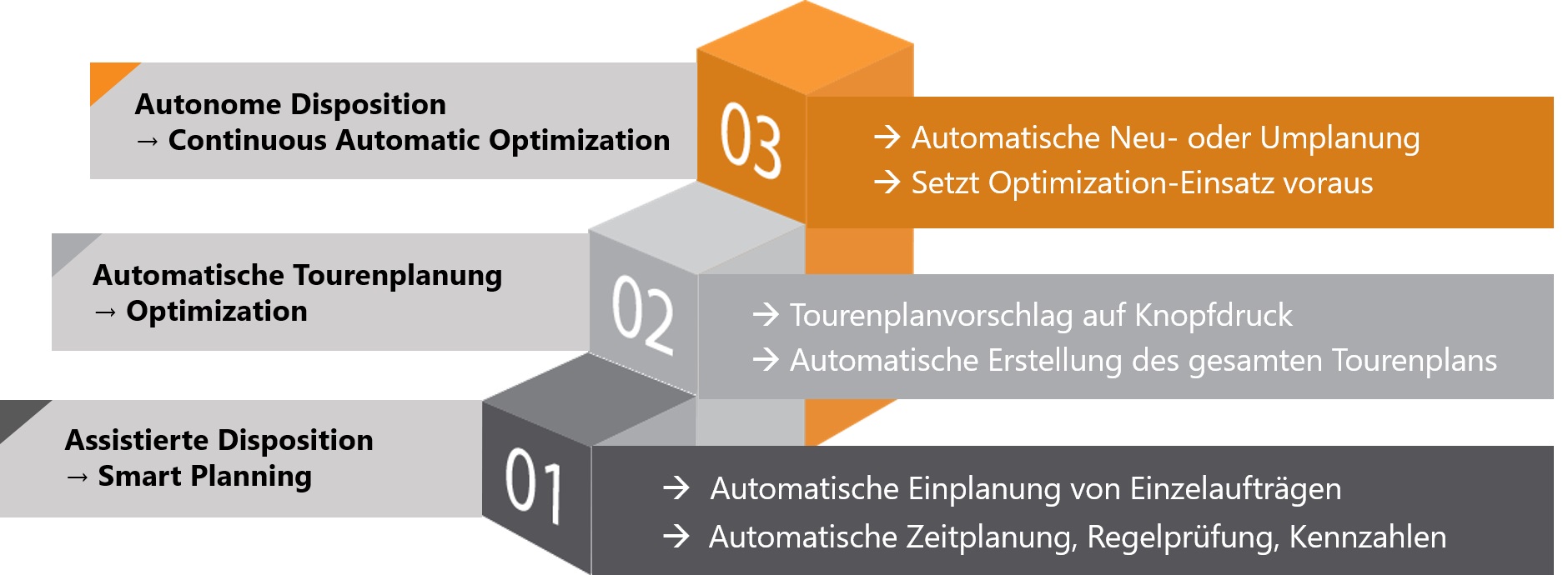
Analogous to the stage concept of automated driving, the development towards autonomous dispatching can also be described as a stage model. The following 3 stages of automated dispatching can be distinguished, plus stage 0 as the initial situation:
Level 0: Scheduling without automation support
In this initial form, the planner makes all planning decisions themself. Only individual calculation functions, e.g. by digital route planners, are taken from them. There is no automated checking of the consistency and feasibility of the plans created.
Stage 1: Assisted scheduling
The dispatcher still makes essential dispatching decisions, but the consistency and accuracy of the plans is ensured by the system. The dispatcher is supported by numerous assistance functions that ensure digitalisation and partial automation:
- Automatic scheduling of individual orders
At the push of a button, the system plans individual transport orders into an existing plan in the best possible way and suggests the best possible follow-up order for a vehicle.
- Automatic key figures
The scheduler recognises the extent to which target specifications have been achieved by means of utilisation indicators.
- Automatic control check
All interventions by the dispatcher are automatically checked by the system in real time to ensure that they are free of errors (required vehicle equipment, necessary driver qualifications, freight space capacity, combined or subsequent load prohibitions, etc.).
- Automatic scheduling and plan consistency
With each planning action by the dispatcher, the overall plan is automatically adjusted in such a way that plan consistency is ensured. In particular, all start dates and times are adjusted in such a way that delivery dates are met and double occupancy of vehicles, trailers or drivers is excluded.
- Automatic pause calculation
The breaks required to comply with driving and working time regulations are automatically added by the system to all the dispatcher’s planning actions.
Stage 2: Automatic route planning
The initial route plan is created automatically by the system. The dispatcher starts the planning manually at the push of a button. The user’s preferences, e.g. regarding the weighting of kilometre minimisation and adherence to schedules, can be mapped via parameters. The system ensures that the plan is free of errors and that the planning results are of high quality.
The scheduler themself, must assess whether and when rescheduling or replanning is necessary during ongoing operations.
Level 3: Autonomous scheduling
Based on the incoming telematics data from the vehicles, the system decides independently whether and when rescheduling or rescheduling makes sense. Rescheduling or rescheduling is started automatically by the system.
The dispatcher becomes a controller who monitors both planning and tour execution with the help of the system and only intervenes in exceptional cases. The focus of the work shifts more towards customer care.
The state of the art
Assistance functions for digitalisation (level 1) have already been found for several years in various standard software systems for truck dispatching. Their application is usually possible for a relatively wide range of transport types. However, there are major differences in the scope of the assistance functions.
Some systems already offer the possibility of automatic route planning (level 2). However, not all types of transport and planning restrictions are supported here, so it is essential to check the applicability in detail.
The first practical applications of dynamic automatic dispatching (level 3) are known from the area of full load depot transports. Overall, however, it can be assumed that the topic will continue to gain momentum very quickly, both on the provider and user side.